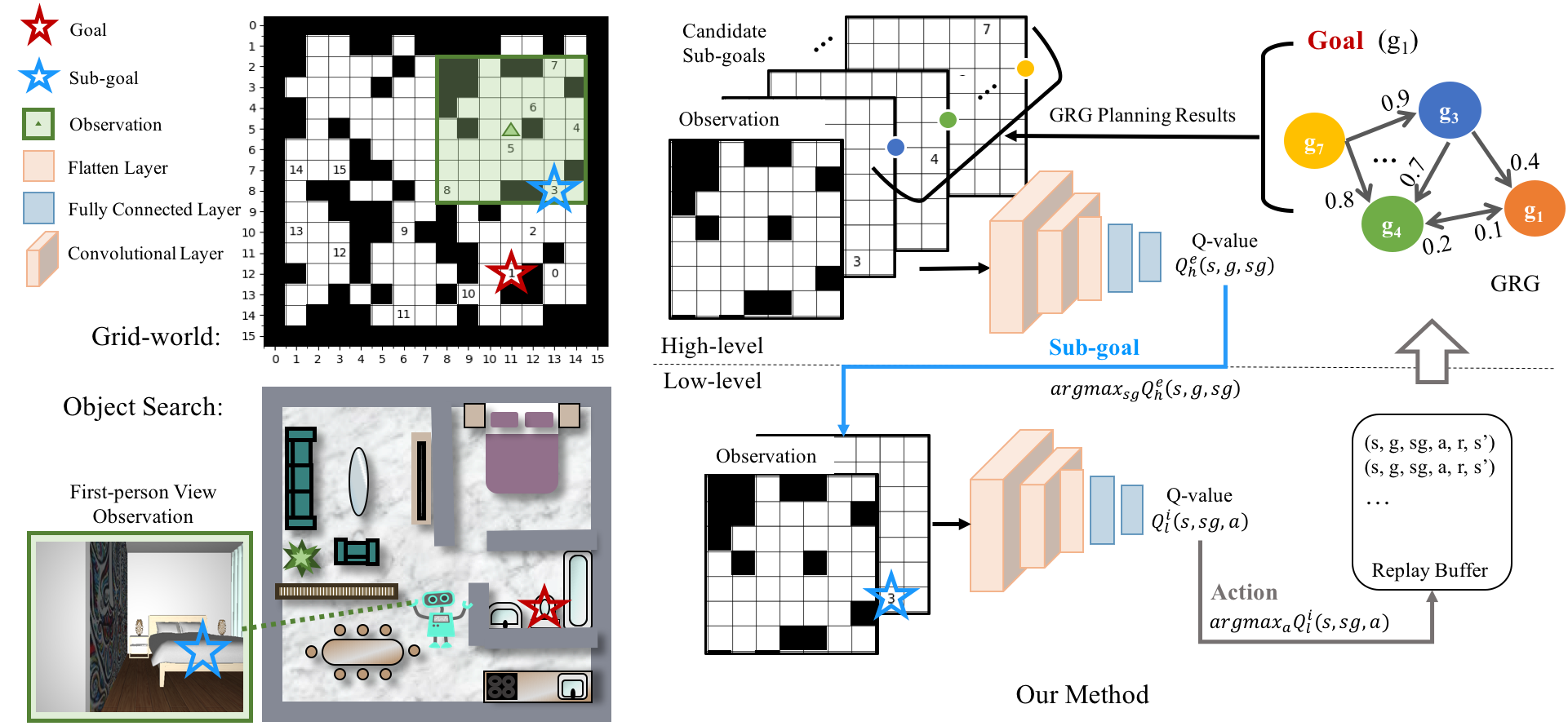
We present a novel two-layer hierarchical reinforcement learning approach equipped with a Goals Relational Graph (GRG) for tackling the partially observable goal-driven task, such as goal-driven visual navigation. Our GRG captures the underlying relations of all goals in the goal space through a Dirichlet-categorical process that facilitates: 1) the high-level network raising a sub-goal towards achieving a designated final goal; 2) the low-level network towards an optimal policy; and 3) the overall system generalizing unseen environments and goals. We evaluate our approach with two settings of partially observable goal-driven tasks --- a grid-world domain and a robotic object search task. Our experimental results show that our approach exhibits superior generalization performance on both unseen environments and new goals.
|
unseen environments seen goals |
unseen environments unseen goals |
||
|
kitchen (toaster) |
living room (painting) |
|
bedroom (mirror) |
bathroom (towel) |
|
unseen environments unseen goals |
|
|
seen environment seen goal (television) |
seen environment unseen goal (ottoman) |
|
unseen environment seen goal (television) |
unseen environment unseen goal (music) |
If you find this work helpful, please consider citing:
@InProceedings{ye2021hierarchical,
author={Ye, Xin and Yang, Yezhou},
title={Hierarchical and Partially Observable Goal-driven Policy Learning with Goals Relational Graph},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
month = {June},
year = {2021}
}